Lidar sensor는 자율주행 차량의 주변환경을 인지하는데 널리 사용된다.
최근에 라이더 센서의 해상도가 지속적으로 증가함에 따라 많은 양의 data가 발생하고 이러한 data를 전송하고 저장해야 되기 때문에 압축기술이 중요해지고 있다.
기존의 방법은 Lidar 정보를 직접 압축하거나 포인트 클라우드 방식으로 압축을 진행하였다.
그러나, Lidar의 정보를 직접 압축하게 될 경우 센서와 보정정보에 따라 정보가 달라져 불안정성을 초래한다.
그에 따라 Lidar에는 새로운 압축기술이 필요하고 여기에 compression sensing을 활용한 압축기법이 소개되고 있다.

위의 그림은 3D lidar data를 2D image array로 생성하게 되었을 경우의 raw distance value를 나타낸 그림이다.

위의 그림은 lidar 스캔의 일부분을 이미지 형태로 시각화한 것이다.
D는 raw distance value를 나타내고 하단의 X, Y, Z는 각각 수평, 수직, 거리에 대한 좌표를 나타낸다.
이들을 활용하여 lidar 센서로부터 감지된 각 점의 정확한 위치를 3차원 공간에서 파악할 수 있게 된다.
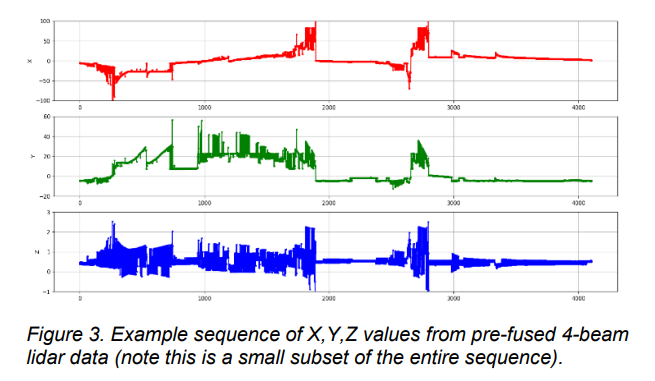
위의 그림은 X,Y,Z 값의 시퀀스 예시를 보여주고있다.

위의 그림은 포인트 클라우드의 3D 시각화한 모습을 보여주고있다,
만약 방출 펄스에 대한 반환을 받지 못하는 경우 이를 누락된 데이터 포인트값으로 간주하고 간단하게 인코딩을 진행한다.
예를들어, lidar 센서가 건물을 향해 lidar pulse를 발사했을경우 센서가 정확한 거리를 측정했다면, 이 거리 정보는 X,Y,Z 좌표로 변환된다. 만약, 이러한 건물이 너무 먼 경우 lidar센서가 반환된 데이터 값을 받지 못하고 X,Y,Z값과 거리를 모두 0으로 압축한다.
'RADAR' 카테고리의 다른 글
| RDA algorithm (0) | 2024.03.19 |
|---|---|
| Radar의 정의 (1) | 2024.02.14 |
| RCS Prediction Methods (1) | 2024.02.05 |
| RCS of Complex Objects (0) | 2024.02.04 |
| RCS of simple objects(2) (2) | 2024.02.04 |



