Radar의 수신기는 여러 개의 matched filter 사용
matched filter:최대 SNR(성능)

matched filter는 x*(-t)로 설정한다.
x(t)와 x*(-t)를 컨볼루션을 통해 output을 도출한다.

s(t)를 수신신호 r(t)를 reflected 돼서 돌아온 신호라고 정의한다.
그때, r(t)는 delay와 doppler frequency에 의해 위와 같이 바뀐다.

single matched filter의 경우에는 r(t)와 x*(-t)를 컨볼루션을 통해 값을 얻는다.
그러나, 우리는 matched fitler를 여러 개 사용하여 delay time과 doppler frequency가 적합한 matched filter를 사용하여 계산한다. 그 결과 Ambiguity function의 기본식이 완성된다.

tau=지연시간 f=doppler frequency

따라서 Ambiguity function은 위와 같이 정의된다.
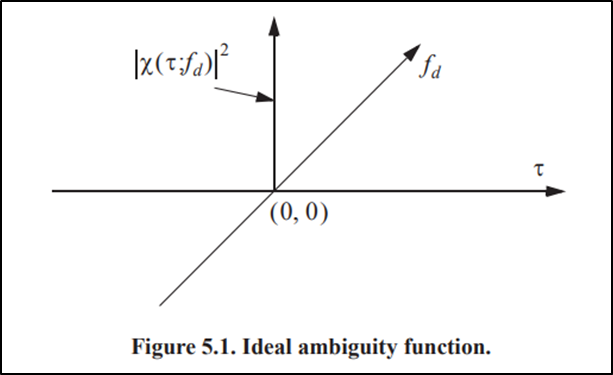
이상적인 경우에서의 ambiguity function을 나타낸 그림이다.
그 경우에는 tau=0, f=0일 때 peak값을 가지고 나머지 부근에서는 0을 의미한다.
Ambiguity function의 특징

ambiguity function은 시간과 주파수 축을 기준으로 대칭성을 가진다.

ambiguity function은 시간 주파수 영역에서 면적이나 부피가 일정하다.

ambiguity function은 파세발 정리를 사용하여 원 신호와 푸리에 변환 신호 간의 에너지 보존 관계를 나타낸다.

도플러 주파수가 0일 경우 ambiguity function의 f에 0을 대입해 보면 autocorrelation관계에 있는 것을 볼 수 있다. 그래서 rect signal을 전송한 경우에 삼각형의 모양을 띄게 된다.
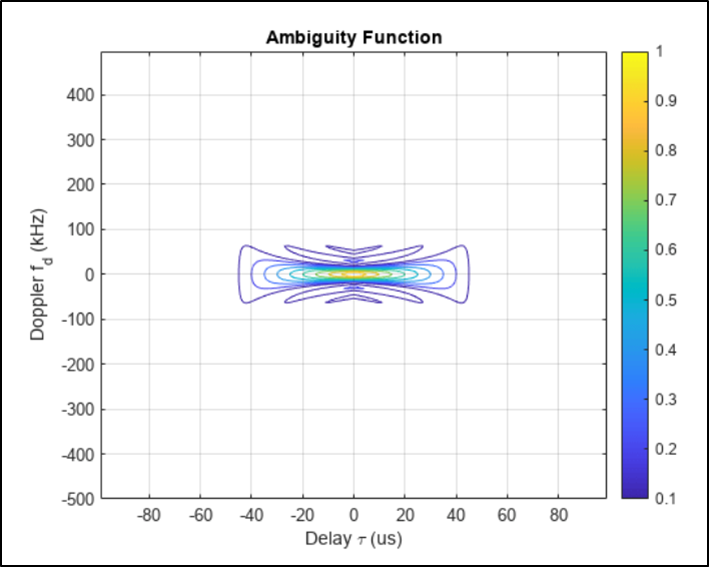

위의 그림은 사각펄스를 ambiguity function에 대입할 경우 contour을 그린 그림이다. 여기서 doppler frequency가 작아질경우 삼각형의 크기가 감소하는 것을 볼 수 있다. 여기서 문제는 delay가 0 근처에서 doppler frequency가 변할 경우 time resolution을 알기 어려워진다. 이 말은 delay time이 0일 경우에 삼각형의 모양이 빠르게 감소하여 정확한 delay time을 구하기 힘들어지고 이는 곧 time resolution의 감소로 이어집니다.
또한 delay time의 시간이 길기 때문에 레이더가 더 많은 시간을 소비하여 목표물을 추적한다. 이는 효율성 측면에서 좋지 못합니다. 이를 극복하기 위해 다른 rect 파형 대신 다른 파형을 radar에 사용합니다.
LFM ambiguity function

일반적인 CW(continous wave) sin파형을 통해 이를 알아보자. 일반적인 sin파형을 푸리에 변환하게 되면 sinc파형이 나오게 된다. 이는 band가 너무 좁기 때문에 여러 개의 수신기가 overlapped 되어 separate가 어렵다. 이를 해결하기 위해 impulse signal을 주어 시간영역을 짧게 해 구별력을 상승시킬 수 있다. 여기서 impulse signal의 경우 순간전력이 너무 크기 때문에 문제가 발생한다. 이 둘을 적절하게 배합한 게 우리가 이제부터 공부할 chrip singal이다.

chirp singal의 경우 주파수가 점차 증가하는 방식으로 푸리에 변환하였을 때 일반적인 sin 파형보다 band가 길어 신호들을 더 쉽게 구별가능하다. 그리고 시간영역에서 보았을 때에도 finite 한 방식이기 때문에 radar에 있어 적합한 signal이다.

Chirp singal은 위와 같은 식으로 구현가능하다.

chrip signal은 rectangular signal에 비해 delay time이 짧아서 효율적인 측면에서 더 나은 성능을 보인다. 또한 delay time이 0인경우에도 time solution값을 잘 구할 수 있다. 또한 시간에 따라 주파수가 변화하기 때문에 움직이는 목표물에 대한 doppler 효과를 측정한데 유용하다.

zero doppler의 경우 LFM pulse의 파형을 나타낸 그림이다. 이 경우 peak의 값이 좁은 범위에 나타나 있어 두 개의 물체의 구별에 있어 좋은 성능을 보인다. 반면 rect pulse의 경우에는 두 물체를 구별하는 데 있어 어려움을 보인다.
Coherent Pulse Train Ambiguity function

앞선 사각펄스의 문제를 해결하기 위해서 coherent pulse train을 사용한다.

위의 그림은 rect single pulse ambiguity function을 나타낸 그림이다. 여기서 두 개의 signal이 들어오게 되면 두 신호의 구분이 어려워진다는 것을 보여준다.

위의 그림을 통해 zero frequency cut coherent pulse train ambiguity function을 보여준다. 이를 통해 위의 그림보다는 두 신호의 구분이 조금 더 쉬워진 것을 볼 수 있다.

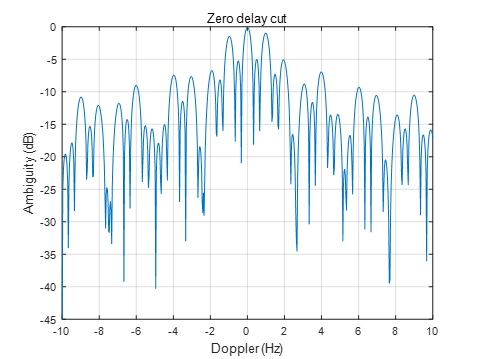
위는 single pulse rectangular ambiguity function의 zero delay를 보여준 그림이다.
ambiguity function이 0이 되는지 점에 delay와 doppler 편의가 정확한 값을 가진다.
도플러 영역에서 1 MHz차이가 있어야 두 대상을 분리가능하기 때문에 만약 같은 거리에 있게 될 경우 각각의 신호는 150km/s차이가 필요하다.

위는 coherent pulse train ambiguity function의 zero delay를 보여주는 그림이다.
위의 그림을 통해 single pulse보다 coherent pulse의 경우 거리가 같은 두 신호를 훨씬 더 적은 속도 차이로도 두 신호를 구분할 수 있다.
LFM Coherent Pulse Train Ambiguity function

위의 그림은 LFM coherent pulse train을 나타낸그림이다. 이를 통해 LFM의 성능개선이 가능해진다.
위의 그림은 delay가 없을때의 ambiguity function을 나타낸 그림이다. 여러 개의 signal을 보내기 때문에 한 번여 여러 개의 물체를 탐지가능하다

zero doppler일 경우의 그림이다. 일반 LFM의 signal의 경우 zero doppler cut을 하게 되면 하나의 peak를 가지게 되고 이는 단일 물체에 대해서만 효과적이므로 여러 물체가 있는 경우 분이 어렵다. 대신 coherent pulse train을 사용하게 되면 여러 개의 peak를 통해 다중 감지에 유용해질 수 있다.
'RADAR' 카테고리의 다른 글
| radar propagation (0) | 2024.01.16 |
|---|---|
| Stepped frequency waveform,Nonlinear FM (2) | 2024.01.10 |
| Radar equation with Jamming (2) | 2024.01.05 |
| Surveillance Radar equation (1) | 2024.01.04 |
| PRF radar equation (0) | 2024.01.04 |



